床反力のフィードバックを利用した平衡制御法
電車に乗っていると,足の下で重心が移動しているのを感じます.その重心が足の真ん中にあると,倒れるリスクが少ないことが経験的にわかります.その重心は床圧中心とかCoP(Center of Pressure)とも呼ばれ,床からの全反力の作用点とみなすことができます.
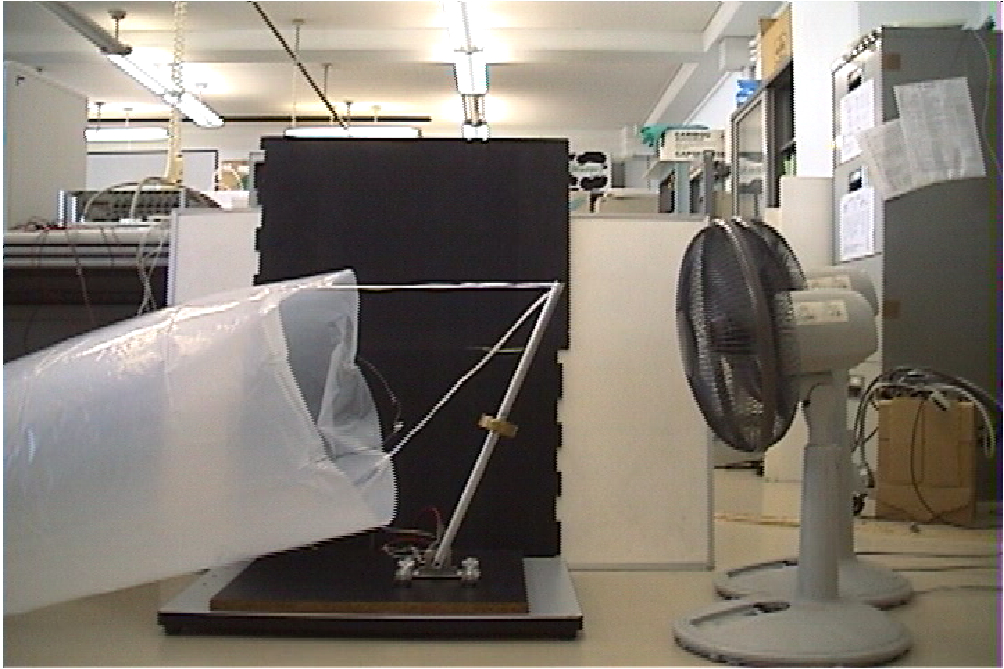
この研究ではCoPをフィードバックして,足の中央部に制御する制御法を提案し,数式により安定性についての解析を行いました.さらに簡単なロボットでその効果の実験を行いました.ロボットは床の傾斜角度や風などの外力に対して適応的に姿勢を変化させることを実証しました.