自律移動ロボットの研究
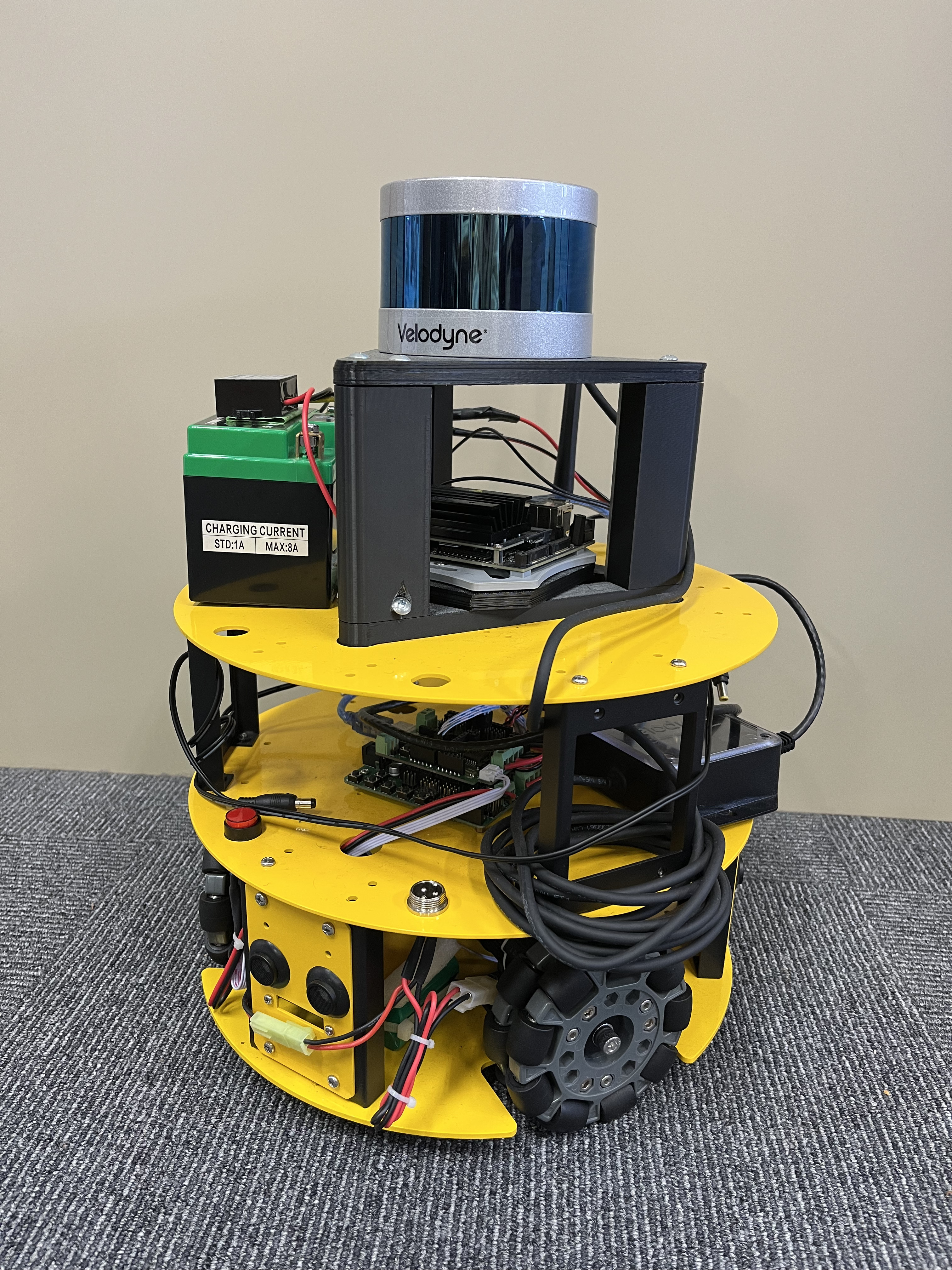
工場内を無人で部品等を搬送する自律移動ロボット(AMR:Autonomous Mobile Robot) を目指した共同研究に参画し,その中「AMRの走行場所の地図の事前作成技術」に関する研究をで担当しました.AMR が現在の自分の位置を知るには、その地点を含む場所の地図が必要となります。その地図は,開発中のAMR に搭載するセンサー(LiDAR) に依存した形式,すなわちPCD(Point Cloud Data)Mapとして準備する必要があります.従来は,その地図はAMR に搭載しているLiDAR を利用して計測し作成していました.そのためセンサを作動しながらAMR を現場で手動操作で走行させるなどが必要でした.本研究では工場の設計図面とタブレット端末による計測(スキャン)により,その地図を3Dで作成する手法を確立しました。