Autonomous Mobile Robot
This study is a part of collaborative research aiming at Autonomous Mobile Robots (AMRs), unmanned vehicles that convey parts in factories. Specifically, this study addresses the creation of a Point Cloud Data (PCD) map for the workspace of AMRs.
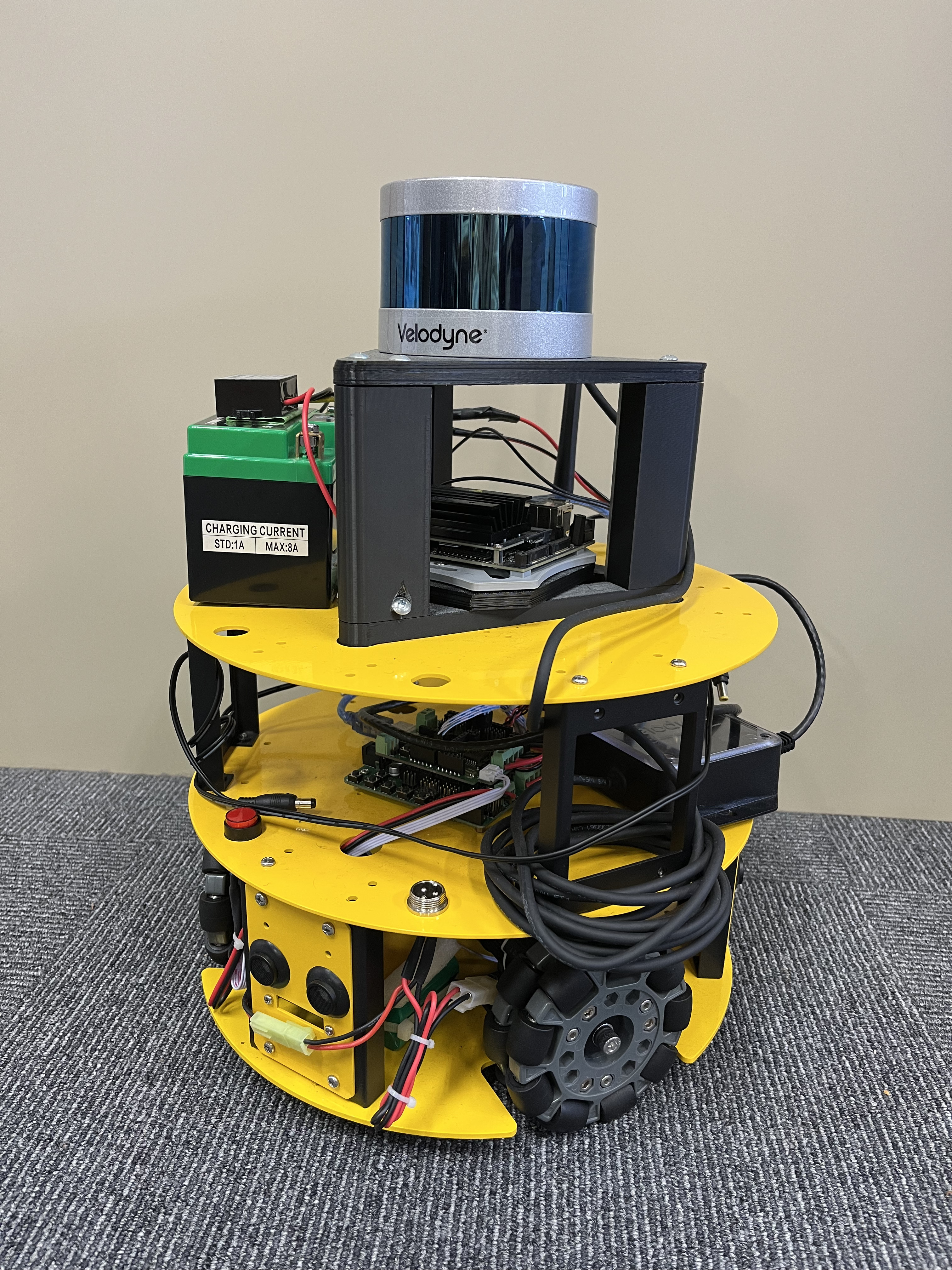
For self-localization, a map containing the current position is usually required in advance. This map should be created in a format compatible with the sensors on AMRs. As our AMRs are equipped with 3D LiDAR, a Point Cloud Data (PCD) map should be prepared.
In the conventional method, the LiDAR on the AMRs is utilized. This method requires scanning the workspace by running the AMRs manually before they are actually introduced. This study establishes a method to create the PCD map from the design drawings, combining tablet PC scans for the objects not existing in the drawings.