筋電信号による手動作推定
ロボットハンドなどを操作するインターフェースとして,手の動きを直接利用できると便利です.人の手の動きは脳から伝えられる微弱な電気信号によって筋が駆動されることで実現されています.筋の動きと関連するこの微弱な信号は筋電信号と呼ばれています.この筋電信号をうまく解析すれば,人体の動きを推定できる可能性があります.
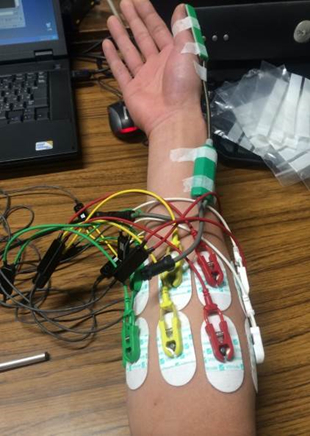
ある動きを生成するときに中心的な働きを示す筋を主動筋と呼びます.通常,検出・計測したい動きに対してその主動筋を選んで電極を張り,そこからの筋電信号を取得します.しかし,主動筋の選択には知識と経験を要し,その電極位置により筋電信号,すなわち動作検出の良否が左右されます.
そこで本研究では,多くの電極を利用することで,必ずしも主動筋を狙わなくても動作の検出ができるよう,信号処理を工夫することを考えています.主成分分析,道立成分分析や,サポートベクターマシン,ニューラルネットワークなどを利用することで,筋電からの手動作の推定を試みます.