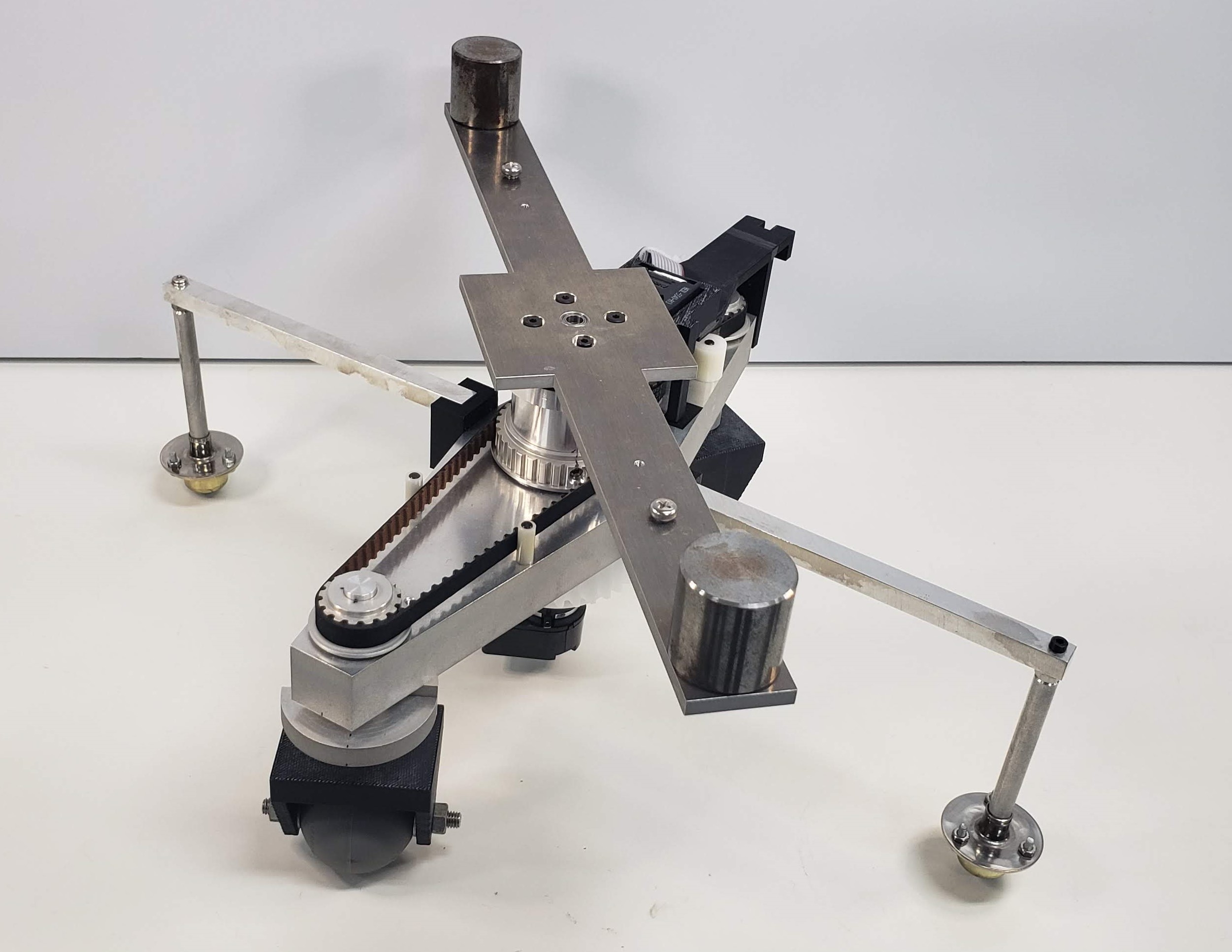
One-actuator skateboard robot
An one-motor-actuated mobile robot was originally developed by our laboratory. We inspired the driving method from the Snakeboard.
The Snakeboard normally have three degrees of freedom of motion, the orientations of the front and rear wheels, and the rotor rotations. We coupled these three to activate together with one motor. In this coupling, the first robot intorduced the torque limiter, which disconnect the coupling when the larger torque is exerted.
Straight motion
Straight motion (Top view)
Curving motion
Arival to the goal position
The second robot was designed without the torque limiter.