Biped robot mechanism and its adaptive locomotion
Our study on balance control enables the robot to adapt to the slope. The posture automatically changes with the slope angles. This study applies it to the biped walk on the slope.
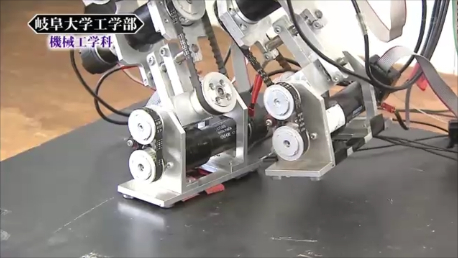
Another feature of this study is found at the mechanism of the biped robot. By restricting the biped motion only to the straight walk, the hip joint structure is reduced to the mechanism with only two motors, i.e., two degrees of freedom (DoFs), although it has the six DoFs in many biped robots.
Upward slope
downward slope