研究内容
(詳しく知りたい方はこちらもどうぞ)
平衡感覚の知覚と運動学習
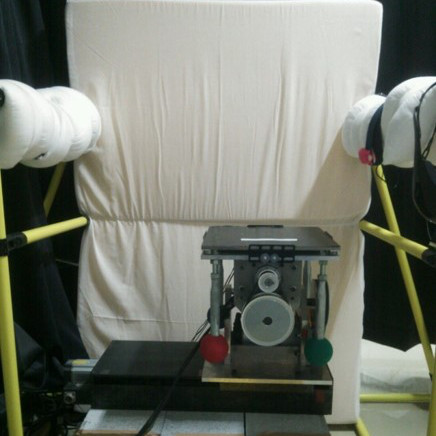 ヒトの平衡において,バランスを保つ運動が平衡感覚にどのように影響を与えるかを実験的に調べています.
ヒトの平衡において,バランスを保つ運動が平衡感覚にどのように影響を与えるかを実験的に調べています.
実験用に側方向移動と座面ロール回転が可能な椅子を作成し,着座状態で左右に方向付けした周期的外乱を被験者に与えました.
その前後の平衡知覚テストで,直立と感じる姿勢(主観的直立姿勢)を検出したところ,外乱の左右の方向で反対方向に有意に変位する傾向を示しました.
現在,ヒトの平衡制御のメカニズムについてより詳細な研究を進めています.
運動学習と視覚認識
 ヒトの運動学習では,運動パターンの変化ばかりでなく知覚系の適応も観察されます.
ヒトの運動学習では,運動パターンの変化ばかりでなく知覚系の適応も観察されます.
知覚の中で,本研究では視覚,特に見かけの大きさの認識に着目しています.
運動を行うことで対象物が大きくみえてくるという仮説を元にディスプレイに表示された直線をタッチペンでなぞる運動を利用してその実証を目指しています.
そして,人間の運動学習メカニズムを解明し,環境に適応できるロボット制御に応用することを考えています.
組立作業の生体評価

本研究では組立作業における作業負担量を,脳波を用いて評価することを目的としています.
工場のような生産現場では生産効率の向上とともに,作業者への負担量軽減も求められています.
負担量軽減を行うためには,まず負担量の指標が必要となります.そこで生体信号の一つである脳波を指標として負担量を評価しています.生産効率が良く,作業者への負担量が少ない作業環境の提示を目標に研究を進めています.
筋電信号からの手動作推定
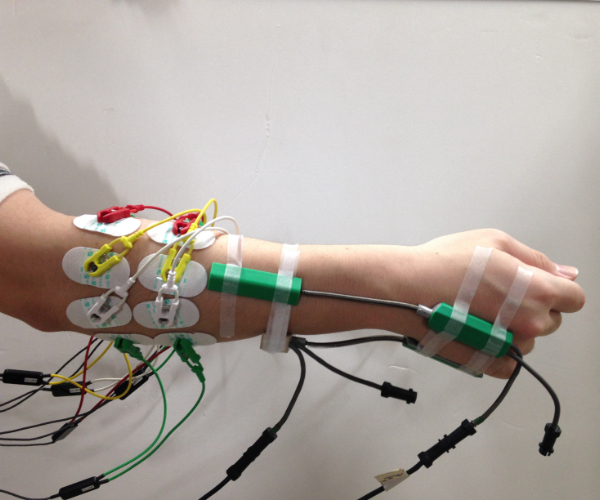 本研究では,上腕の筋電信号を計測し,信号処理に関する解析方法を組み合わせることによって指や手首がどの方向に動いたかを判断や,手首が曲がった角度を推定しています.
本研究では,上腕の筋電信号を計測し,信号処理に関する解析方法を組み合わせることによって指や手首がどの方向に動いたかを判断や,手首が曲がった角度を推定しています.
これにより,人間の動作と筋電信号との動的関係が構築され,筋電義手などの医療・福祉用機器や産業用ロボット・ハンドの操作インターフェースへの利用が期待できます.
ニ足ロボットの歩行制御
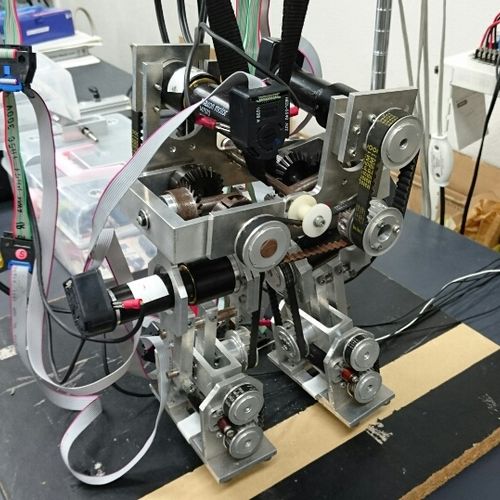 歩行ロボットは人間生活に最も適した移動手段を持つロボットです.
歩行ロボットは人間生活に最も適した移動手段を持つロボットです.
しかし,傾斜や段差など地面の状態に合わせた歩行の生成が必要になります.そこで,一定角度の傾斜を直進歩行できるロボットの設計・製作を行います.
この際,実験目的を満たすことのできる最低限の自由度を持つロボットにすることで,モータを減らし軽量かつ省エネルギー化を目指しています.
さらに,床反力中心制御に基づく平衡制御を考案し坂道歩行を行わせています.
把持の最適姿勢
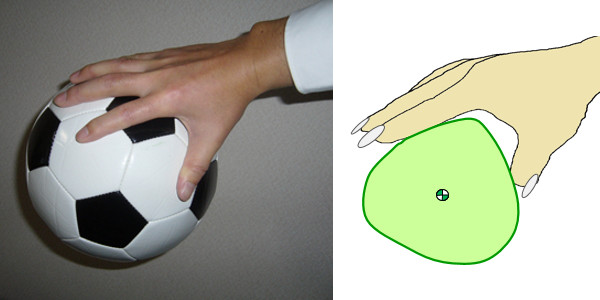 本研究では,物体を把持するとき,どのような姿勢で持つと一番楽に持てるか,つまり,少ない力で持つことができるかを解析しています.
本研究では,物体を把持するとき,どのような姿勢で持つと一番楽に持てるか,つまり,少ない力で持つことができるかを解析しています.
ニ次元空間でのニ点把持では,ニつの接触点での摩擦円錐の交点と物体の質量中心が鉛直線上に並ぶとき,接触力を最も小さくできることがわかりました.
現在,三次元での三点把持に問題を拡張して解析しています.
ニ輪スケートボードの運動制御
 ニ輪スケートボードは地面を蹴ることなく推進することができます.
ニ輪スケートボードは地面を蹴ることなく推進することができます.
本研究では,静的バランスを保ちながら全身運動により推進力を得る駆動原理を解明し,目的地まで誘導する制御方法の確立を目指しています.
現在は補助輪を取り付け,側方向には転倒しないロボットを制作し,直進や旋回運動など基本的な動作の生成を行っています.
将来的には目標位置への到達やバランス制御を実装し、受動車輪を駆動する新しい推進原理に基づいた自律移動型ロボットを実現したいと考えています.
機械学習を用いたラベル検査
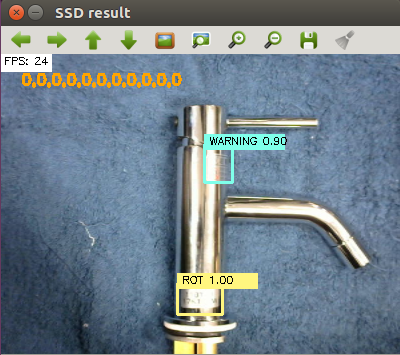
本研究では認識された物体の画像内座標を利用するなど,様々な画像情報の活用について研究しています.
製品の検査に画像認識システムを導入することにより,作業効率の向上と精神的負担の軽減を目指します.
製品に貼り付けられたラベルを確認する検査において画像認識システムを構築し,工場への導入に取り組んでいます.