Research
(If you want to know more, please click here)
Perception and motor learning of human balancing
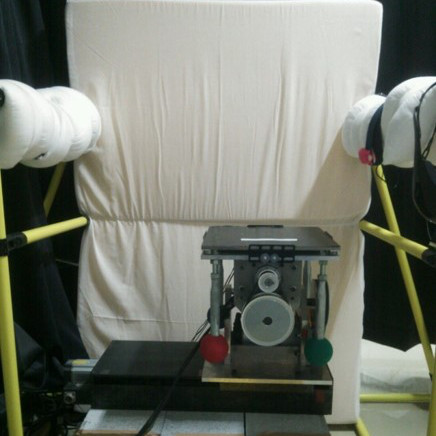 We examine a relation between the perception and the motor learning in human balance maintenance.
We examine a relation between the perception and the motor learning in human balance maintenance.
For the experiments, we designed a stool which horizontally as well as rotates around the roll direction, and instructed the participants on the stool to maintain the seat surface at the horizontal position.
This balance movement proved to affect the upright posture of the participants.
Motor learning and visual recognition
 In human motor learning, adaption of perceptual systems is observed as well as motion pattern variation.
In human motor learning, adaption of perceptual systems is observed as well as motion pattern variation.
We focus on eyesight, in particular apparent size recognition.
We propose our hypothesis that an object looks bigger when we repeat a motion more. Then, we will prove from an experiment with tracing lines on a pad.
In the future, we will clarify a human motor learning mechanism and apply to robot control which is adaptable to environment.
Biological evaluation in assembly task
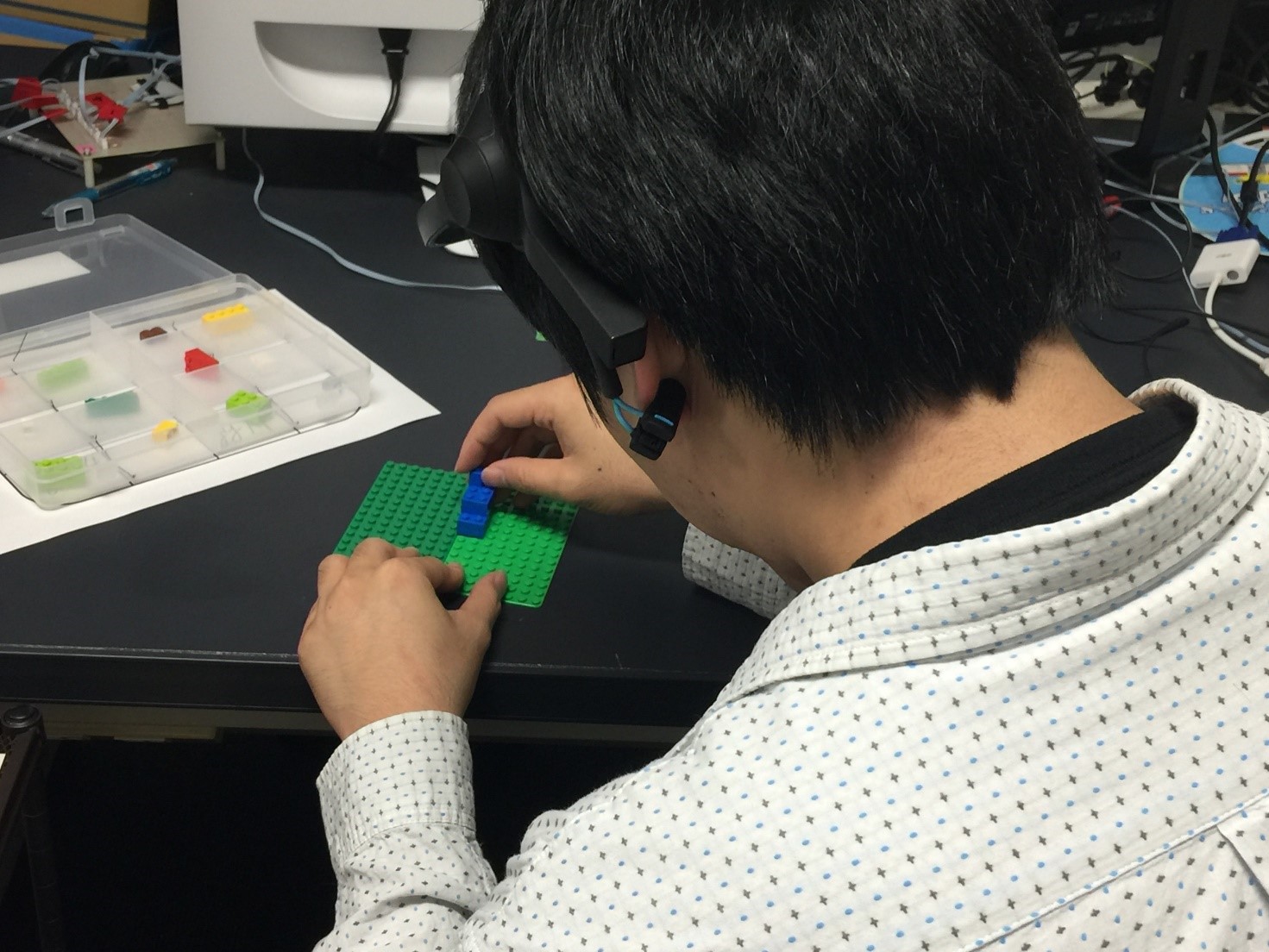
This study aim at evaluating load in assembly task with measuring EEG (Electroencephalogram). Improvement of production efficiency and reduction load in task are demanded in real production sites. Reducing load in task, it is needed to index it. So we index it with measuring EEG which is one of biosignals. We study to goal presenting task environment which is high production efficiency and low load.
Hand motion estimation from myoelectric signals
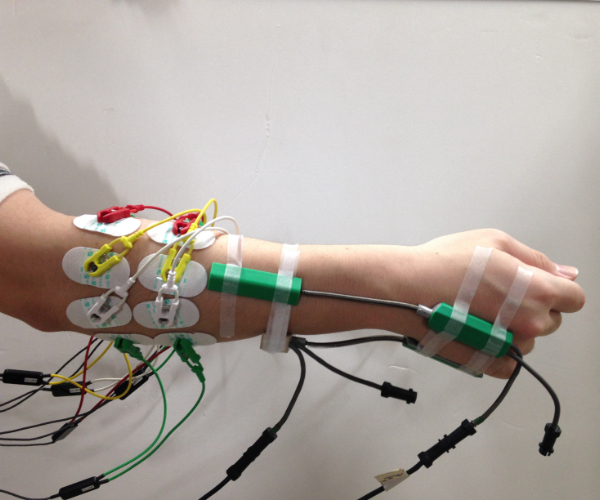 We estimate the motion of fingers or wrists by measuring myoelectric signals with some analysis for signal processing.
We estimate the motion of fingers or wrists by measuring myoelectric signals with some analysis for signal processing.
This will construct relations between human motions and myoelectric signals and it is expected for applications for industrial robot hands or medical welfare equipment such as myoelectric prosthesis limbs.
Walking control of biped robots
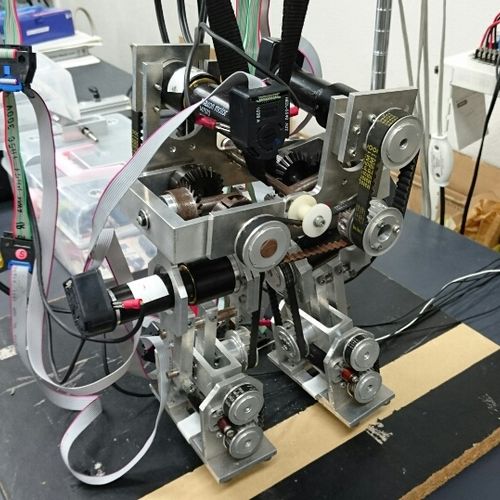 A biped robot is one of the most suitable robots for human life.
A biped robot is one of the most suitable robots for human life.
It is necessary to generate walking algorithm according to the condition of the ground such as slopes or steps.
Therefore, we design a robot which can straight walking at a slope with a certain angle.
We try to reduce the number of motors and achieve lightweight and energy saving by making the robot with the minimum degree of freedom.
Optimum posture of grasping
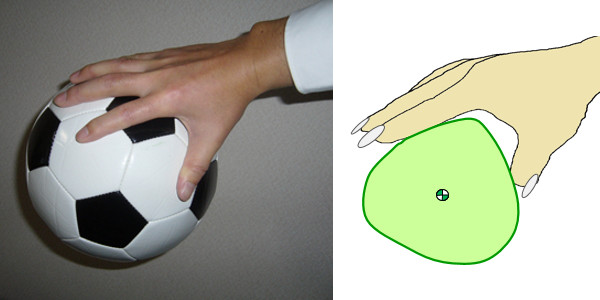 We analyze which position grasp an object easiest, in other words, we clarify how do we grasp by least power.
We analyze which position grasp an object easiest, in other words, we clarify how do we grasp by least power.
In the case of two-point gripping in the two-dimensional space, we found that the contact force is minimized if an intersection of the friction cones at two contact points and the center of mass of the object are aligned on the vertical line.
Currently, we expand the problem for three-point grasping in three-dimensional space.
Motion control of two wheel skateboard
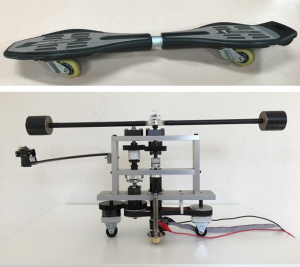 Two-wheel skateboards (caster boards) are driven without kicking the ground.
Two-wheel skateboards (caster boards) are driven without kicking the ground.
Our objectives are to clarify a driving mechanism of caster boards from human’s techniques and to establish a control law which can reach to the specified destination.
Currently, we made a prototype robot and drive the robot with basic motion such as straight or circular motion.
In the future, we will make an autonomous mobile robot based on a novel driving method which can move arbitrary designed trajectory.
Inspection of labels with machine learning
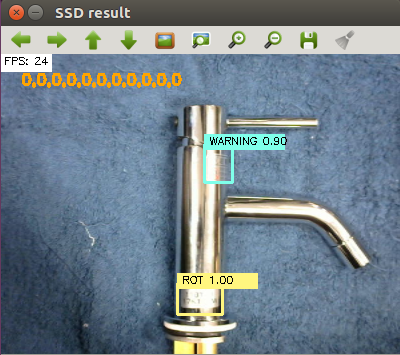
Our image recognition system use some types of image’s information, for example coordinate of recognized the object in image.
We aim improvement of working efficiency and reduction of mental burden with introducing this system to inspection of products.
Now, we are working to introduce the factory to the image recognition system that detection labels pasted on product.